Últimamente yo me solía quejar de que estaba un poco falto de ideas para publicar y por eso tenía el blog algo abandonado. Pues mira tú por dónde, ayer me enteré de algo que me dará para un artículo; pero de momento os dejaré con las ganas de leerlo porque ¡hoy mismo me ha surgido tema para otro! Resulta que se ha sabido que el avión en el que ayer viajaba Ursula Von der Leyen con destino a Bulgaria sufrió interferencias en el GPS. Basta con buscar en Google las palabras Leyen y GPS y salen multitud de artículos sobre este hecho. Incluyo, a modo de ejemplo un enlace al artículo del Financial Times porque según parece fue el primero en dar la noticia. Aun así, saber exactamente qué ocurrió es bastante difícil.
Según la prensa toda la zona alrededor del aeropuerto de Plovdiv dejó de recibir señal GPS y los pilotos tuvieron que utilizar mapas de papel (sic) para la aproximación. No tengo ni idea de qué quieren decir los que han escrito esto, pero puedo asegurar que los pilotos no sacaron un mapa Michelin, ni la guía Campsa para saber dónde estaban. Lo que probablemente ocurrió fue que se produjo una interferencia intencionada que dejó inoperativo el GPS y que por ello los pilotos no pudieron realizar una aproximación RNP, que era la que debían de tener planeada y a la que los controladores les habían autorizado, o pensaban autorizarles. Por consiguiente, debieron de tener que preparar otra aproximación diferente: ILS, VOR… o incluso una aproximación visual. Eso les llevaría a consultar la ficha del aeropuerto, quizás en formato papel, pero más probablemente en formato electrónico. No es ningún drama tener que consultar una aproximación: forzosamente tuvieron que hacerlo desde un principio para repasar los detalles de la aproximación RNP planeada inicialmente y el procedimiento a seguir en caso de frustrada.
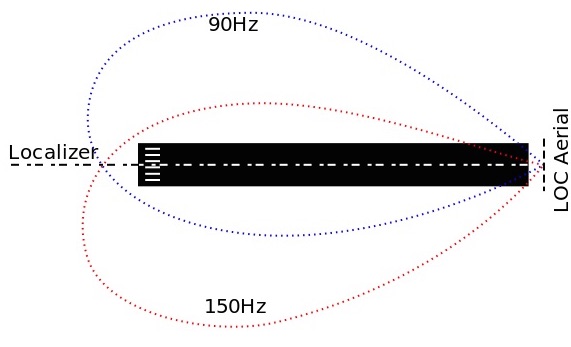
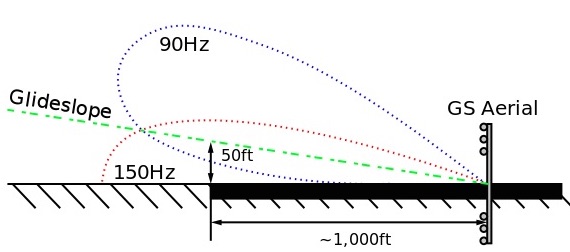
Si doy por sentado que la aproximación que pensaban hacer era RNP es porque este tipo de aproximaciones tienen como referencia puntos definidos por coordenadas para utilizar con el GPS. Ciertamente son aproximaciones más flexibles que las tradicionales ILS, que definen una trayectoria única que pone al avión en la pista (para más detalles ver este artículo en el que describo el ILS). Sin embargo, el ILS es más robusto porque no usa coordenadas como referencia: simplemente indica si el avión está por encima o por debajo de la trayectoria ideal y si está a la izquierda o a la derecha de dicha trayectoria. Consultando la página del aeropuerto, sabemos que Plovdiv tiene ILS para la pista 30, pero no para la 12. Lo ideal para saber más sería consultar la publicación oficial de aeropuertos de Bulgaria, pero como es necesario registrarse, me conformo con ver una página no oficial en donde se especifica que tanto para la pista 12 como para la 30 hay aproximaciones RNP y VOR. Para la pista 30 además hay ILS. Estos datos nos serán útiles un poco más adelante, porque ahora vamos a dejar momentáneamente los detalles sobre Plovdiv para discutir qué pasó con el GPS.
El problema de las interferencias intencionadas que afectan al GPS va en aumento, sobre todo desde el inicio de la guerra de Ucrania. Para hacernos una idea de hasta qué punto es acuciante el problema basta con ver la página gpsjam.org en donde se muestra un mapa con los «puntos calientes» en los que se están produciendo interferencias. Éstas pueden ser de dos tipos: jamming y spoofing. En el primer caso, jamming, nos referimos a la existencia de una señal potente que enmascara la del GPS. Esto es bastante sencillo de lograr porque todos los satélites GPS utilizan las mismas frecuencias y sólo se distinguen entre sí por el código binario emitido. La señal de los satélites es además bastante débil así que si alguien emite una señal potente en la frecuencia del GPS, el receptor no consigue extraer la información que envían los satélites y deja de dar la posición hasta que cesa la emisión de la señal espuria o se sale de la zona en la que ésta actúa.
El spoofing es un tipo de ataque mucho más sofisticado: consiste en emitir una señal falsa con el mismo formato de la señal del GPS, de manera que el receptor se encuentra con mensajes de satélites inexistentes que envían parámetros erróneos. En este caso el receptor calcula posiciones incorrectas, absurdas o no consigue ni siquiera establecer la hora exacta, para lo que necesita recibir una señal GPS correcta, puesto que depende del reloj atómico, extraordinariamente preciso, que llevan los satélites. En este caso es posible que el receptor no vuelva a funcionar adecuadamente hasta que se reinicie por completo y en un avión es probable que esto no se pueda realizar hasta estar en tierra. Las consecuencias son potencialmente muy graves: no se puede calcular la posición correcta y por eso no se puede volar con precisión (de ahí que no se puedan usar aproximaciones RNP). También puede verse afectado el control aéreo si utiliza ADS-B, un sistema que presenta en la pantalla la posición que envía el avión según su sistema de navegación, en lugar de la posición obtenida por el radar. Tampoco funciona el sistema de comunicación digital CPDLC entre controlador y piloto, que se usa como complemento a la tradicional radio, puesto que los mensajes tienen una marca de tiempo para verificar su validez, y naturalmente la referencia temporal se basa en los relojes atómicos del GPS. Hay más efectos, pero creo que con esto basta para hacerse una idea.
En el mapa de gpsjam que enlacé antes se puede ver cómo están muy afectadas zonas como la costa oeste del Mar Negro, la zona del Báltico, etc. También se ven zonas en el interior de Rusia, que posiblemente coinciden con áreas estratégicas, ya que estas interferencias se emplean a menudo como defensa contra misiles guiados por GPS. El efecto de dichas interferencias en instalaciones civiles puede ser devastador. A modo de ejemplo, el año pasado Finnair tuvo que suspender sus vuelos al aeropuerto de Tartu, en Estonia, debido a la imposibilidad de realizar aproximaciones basadas en GPS.
Y ahora volvamos al avión de Von der Leyen. Por los datos que vimos antes sobre el aeropuerto de Plovdiv, sabemos que la pista preferente en ese aeropuerto es la 30. ¿Por qué lo sabemos? Porque es la que tiene el tradicional sistema ILS, que ha sido durante décadas el sistema por excelencia de aproximación. El ILS se pone en la pista que más se emplea y, si las circunstancias lo hacen aconsejable, se instala otro para emplear la pista en el sentido opuesto. Además sabemos que las interferencias no permitieron emplear la aproximación prevista, que tenía que ser RNP para verse afectada por un fallo de GPS. Esto indica que o bien el viento obligaba a utilizar la pista 12 en Plovdiv, o allí se emplea con preferencia la aproximación RNP incluso cuando está en servicio la pista 30. ¿Pero por qué alguien renunciaría a utilizar un sistema tan preciso y fiable como el ILS en beneficio del RNP?
Ahí está el quid de la cuestión. La tendencia es utilizar el GPS para todo porque sale más barato. Ya hemos visto que en lugar de radar se puede emplear un sistema ADS-B, que es más económico, pero que obliga a depender del GPS. Y como referencia de tiempo se emplea siempre la de los relojes del GPS. Y en el caso de las aproximaciones instrumentales, se quiere jubilar el ILS, porque es caro de instalar y mantener, para utilizar en su lugar un sistema más flexible, pero que no da más precisión y es más vulnerable. Y recordemos: un avión que haya pasado por una zona de spoofing puede verse afectado hasta el aterrizaje, con lo que es posible que no pueda completar una aproximación RNP aunque el aeropuerto en sí esté a salvo de interferencias.
Es posible que el incidente de Von der Leyen tenga un lado positivo: quizás ahora la Unión Europea decida que se deben mantener determinadas ayudas a la navegación basadas en tierra, aunque sea como un complemento, y reconsidere la tendencia a depender exclusivamente de sistemas basados en satélites. No podrán decir que no conocen las posibles consecuencias de primera mano.