
Etiquetas
Aviación, ILS, Navegación aérea, Navegación inercial, Seguridad aérea, Técnica
Lo malo de iniciar una serie de artículos sobre un mismo tema es que estás obligado a seguir con ella, aunque en este caso la obligación será corta porque éste es el último de los que se refieren a navegación aérea. Vamos a hablar de dos sistemas que utilizan los pilotos en fases del vuelo muy diferentes. El primero de ellos, el navegador inercial, es el sistema perfecto para su uso sobre el océano, porque es totalmente autónomo, es decir que no necesita de ningún equipo externo a la aeronave. El segundo, el ILS, es el que se emplea para realizar el guiado a una pista en condiciones de baja visibilidad.
Entender el inercial es muy sencillo. Empezaremos con un ejemplo: supongamos que viajamos en coche de Madrid a Barcelona (ciudades entre las que hay unos 600 Km) y tras tres horas de viaje nos preguntamos dónde estamos aproximadamente. Sabiendo que nuestra velocidad media es de unos 100 Km/h y que llevamos 3 horas de viaje es fácil suponer que estamos a 300 Km de Madrid, esto es a mitad de camino. La respuesta por tanto es: «debemos de estar llegando a Zaragoza». Quien no haya hecho alguna vez un cálculo similar es que nunca ha viajado en coche.
En la navegación marítima se utiliza desde siempre un sistema parecido: conocido nuestro rumbo y la velocidad aproximada podemos calcular nuestro posición «a estima», que es el nombre que tiene este método. Pero en aviación no usamos la velocidad directamente. En su lugar utilizamos la aceleración para calcular la velocidad y a partir de ahí la posición. Me explico con otro ejemplo: todos hemos visto algún teléfono provisto de acelerómetros, que sirven por ejemplo para girar automáticamente una foto cuando se cambia la posición del teléfono. Supongamos que colgamos un aparato así del techo de un avión. Al acelerar en carrera de despegue veríamos cómo el teléfono va hacia atrás, y con el acelerómetro podríamos saber cuánto aceleramos y qué velocidad alcanzamos. Dejando el teléfono colgado durante todo el vuelo estaríamos midiendo aceleraciones continuamente y calculando velocidades a partir de ellas. Con la velocidad podemos obtener nuestra posición de la misma manera que hacíamos en el coche.
El navegador inercial de los aviones es algo más complicado técnicamente, claro, pero la esencia es la que acabo de explicar. Tienen un problema: que los errores de posición se incrementan con el cuadrado del tiempo transcurrido, por lo que conviene actualizar la posición con frecuencia usando ayudas externas. Es fácil de comprender: un error pequeño nos da una aceleración ligeramente equivocada, por lo que calculamos una velocidad un poco errónea, que nos lleva a una posición que no es del todo correcta. Cuando sigamos calculando, tomaremos esa posición como punto de partida y los nuevos errores se acumularán.
Esto es un inconveniente, pero cuando no hay posibilidad de usar sistemas externos (por ejemplo sobre el océano, donde no hay dónde instalar las ayudas que vimos en artículos anteriores: VOR, DME o NDB) el inercial es lo mejor que tenemos… a excepción de los sistemas de navegación por satélite. Pero hasta que se generalizó el uso del GPS, allá por los años 90, el inercial era el único instrumento que permitía saber la posición en los vuelos transoceánicos.
Ya que mencionamos el GPS, hay que reconocer que los sistemas por satélite han revolucionado la navegación aérea. En la actualidad se emplean junto con todos los sistemas descritos en esta serie de artículos. Pero hay un sistema de navegación del que aún no hemos hablado y que seguirá en uso durante mucho tiempo, a pesar de que las primeras instalaciones datan de la década de 1930. Me refiero al sistema instrumental de ayuda al aterrizaje (Instrument Landing System), más conocido como ILS.
Hasta ahora hemos visto sistemas que permiten saber por dónde volamos, aunque no veamos el mundo exterior, pero ahora se trata de llevar el avión hasta la pista y aunque el GPS tiene excelentes características, no permite esta maniobra, al menos sin equipos auxiliares. El sistema más utilizado para volar hacia la pista sin visibilidad, el ILS, emite una señal que viene modulada de forma distinta según el lugar en el que estemos. Para que sea más fácil de comprender veamos la siguiente imagen, que he tomado, como es costumbre, de Wikipedia.
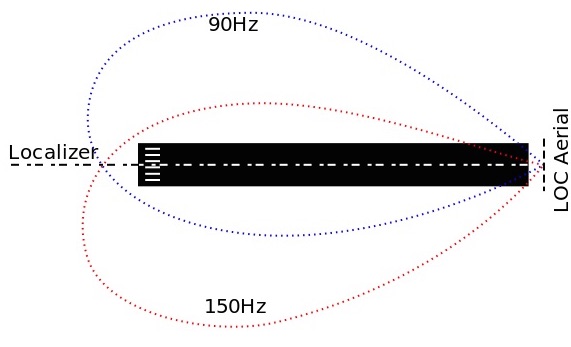
Aquí se ve claro: a la izquierda de la pista recibiremos una señal de 90 Hz mientras que a la derecha captaremos una de 150 Hz. Esto es como si nos pusiéramos unos auriculares y oyéramos un sonido grave si estamos a la izquierda y uno agudo si estamos a la derecha. Cuando los dos sonidos tienen igual intensidad estamos en el centro. El llamado localizador del ILS hace lo mismo, pero electrónicamente, y así sabemos si estamos centrados o no con la pista, y hacia dónde hay que corregir, pero sin necesidad de auriculares ni de sonidos molestos.
Si nos sentáramos en el suelo junto a la pista veríamos algo como lo siguiente:
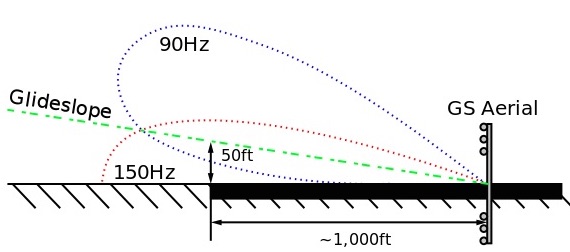 Es la misma idea de antes, exactamente igual, pero ahora las señales nos indican si estamos por encima o por debajo de la llamada senda de planeo. Con los dos subsistemas (localizador y senda) podemos ajustar la trayectoria del avión hasta llegar al punto de contacto con el suelo. Hay además unas balizas para indicar la distancia a la pista, pero creo que no es necesario entrar en más detalle.
Es la misma idea de antes, exactamente igual, pero ahora las señales nos indican si estamos por encima o por debajo de la llamada senda de planeo. Con los dos subsistemas (localizador y senda) podemos ajustar la trayectoria del avión hasta llegar al punto de contacto con el suelo. Hay además unas balizas para indicar la distancia a la pista, pero creo que no es necesario entrar en más detalle.
El ILS tiene tres distintas categorías. Así, un ILS de categoría I (CAT I) permite descender hasta los 200 pies de altura (unos 60 metros), momento en el que el piloto debe frustrar la aproximación si aún no ve la pista. La CAT II permite descender hasta 100 pies (30 metros) y en cuanto a la CAT III, tiene varias subcategorías y podría llegar a permitir el aterrizaje aun sin ver la pista en ningún momento.
Hay un detalle importante: el ILS instalado en el aeropuerto es de una categoría determinada, pero el equipo del avión puede ser de otra diferente y el piloto por su parte tiene que tener la calificación correspondiente a una categoría que puede o no coincidir con las anteriores. Así, si en un aeropuerto se instala un ILS CAT III, pero nuestro avión sólo está certificado para CAT I el piloto tendrá que frustrar al llegar a los 200 pies de altura. Y si el avión también está certificado para CAT III, pero el piloto sólo tiene CAT I, estaremos en el mismo caso.
Gracias al ILS se puede intentar el aterrizaje con poca visibilidad, aunque sólo hasta cierto límite. En cualquier caso, condiciones de baja visibilidad implican demoras aunque tengamos el mejor ILS, los aviones más equipados y los pilotos más entrenados del mundo porque una vez en tierra el avión tiene que encontrar su camino entre la niebla y eso puede hacerle rodar más despacio, por lo que hay que guardar más distancia entre un avión y el siguiente. La seguridad manda, y aunque podamos volar casi a ciegas aún falta mucho para eliminar el casi.
